|
DOI: 10.25136/2409-8728.2023.12.68807
EDN: VIVNFQ
Received:
25-10-2023
Published:
06-12-2023
Abstract:
The article deals with the management of complex systems. The general definitions of the concepts "control" and "control system" are formulated. It is stated that the control system in its basis is an information system, for which the most important characteristics are performance and rapidity. Definitions are given and differences between these characteristics are revealed. The problem of realizability of control of complex systems is stated, which consists in the necessity of providing sufficient rapidity, at which the whole necessary complex of control operations is placed in the control cycle. The relationship between the control parameters: the complexity of the control object, the duration of the control cycle and the rapidity of the control system is investigated. As a result, a number of significant dependencies are revealed: the duration of the control cycle is approximately inversely proportional to the complexity of the control object; the rapidity of the control system is approximately proportional to the square of the object complexity. It is stated that within the framework of the general theory of systems there are two main options for increasing the stability of a complex system: the option of monocentrism with a central element, or by increasing the number of links in the object. The first option does not allow increasing rapidity. The second variant of stability can be implemented in practice in the form of a decentralized system. The latter option is universally realized in living systems and is promising for the control of technical systems.
Keywords:
control, control system, rapidity, control cycle, realizability, complexity, entropy, control object, decentralization, general systems theory
This article is automatically translated.
You can find original text of the article here.
Introduction
One of the essential features of any system characterizing its content is the presence and implementation of management in it. For biological, social, economic, information, technical, and other complex systems, management is obviously necessary to ensure sustainability, development, or the implementation of a functional purpose. For less complex natural and artificial systems, the presence and necessity of management are not always as obvious.
Difficulties in understanding the existence and necessity of management in the system are due to the existence of self-government and self-regulation along with external management. In particular, a biological organism usually has some kind of self-governing body that carries out general management of the body (for example, the central nervous system in animals), as well as mechanisms of self-regulation within each cell and intercellular metabolic processes, etc.
These difficulties necessitate the formalization of the concept of "management". The existing definitions of the concept of "management" do not imply the unification of all the listed special cases of management. It is defined either as a purposeful process of achieving a set (externally) goal, or as a spontaneously realized property of the system.
According to the authors, management should be understood as the process of influencing a system or its subsystems from other subsystems, external systems or a super-system, ensuring that the object of influence (system or subsystem) is brought into a state necessary to maintain stability, development or implementation of a functional purpose.
An important special case of our proposed definition is the impact on the system of its suprasystem. Examples of such an impact are the influence of society on the individual, the economic environment on the enterprise, etc. This control case is of the greatest importance for inanimate nature, where the properties of a physical or chemical system change (to the extent possible for inanimate systems) under the influence of the environment.
The means of implementing management are management systems. A practical approach to classifying systems is to divide them into autonomous and externally controlled systems. However, according to the authors, this division is exclusively methodological, providing variability in the representation of systems that do not necessarily differ qualitatively. Any system represented as a system with external control can be transformed into an autonomous one within the framework of its description by expanding the boundaries of the system – combining a controlled system (control object) and a control system into one system, or expanding the system to the level of a suprasystem.
Thus, without limiting the scope of our study of all control systems, we can consider control only in autonomous systems. In this case, the control system is a structural (covering part of the structural elements) or functional (covering various structural elements combined by a common function) subsystem, ensuring that other subsystems are brought into the required state.
Any management system is basically an information system. Management theory (a science that studies the principles and methods of managing systems) consists of cybernetics [1, p. 30], defined as the science of managing and processing information in animals, machines and society, and information theory [2], defined as the science of quantification, storage and transmission of information. In some cases, the management system includes elements that are not directly related to the information system. In particular, in technical systems, the control system may include sensors or sensors that collect data for the information system, or actuators through which the output data of the information system is converted into control actions (for example, moving the working body of technological equipment).
The most important characteristics that determine the ability of a management system (information system) to perform its management function are performance and speed.
At first glance, performance and performance are similar characteristics, but their practical functions differ significantly. The performance of a control system is defined as the number of elementary control operations per unit of time. In this case, performance is usually calculated over a relatively long time interval and for a large number of control operations. The speed of the control system is the inverse of the duration of the time interval (control cycle) required to perform the entire complex of necessary operations (usually relatively small) for current control, equal to the number of units of complexity of the object serviced by the control system per unit of time [3].
According to A.I. Uemov, there are four main approaches to determining the complexity of an object [4, p. 200]: logical (measures of some properties of relations that are considered simplifying are determined); theoretically-informational (in which complexity is identified with entropy); algorithmic (complexity is determined by the length of the algorithm required to determine the object under study); set-theoretic (complexity is associated with the power of the set of elements that make up the object under study). Any of these approaches can be used to quantify the complexity of the control object.
The fundamental difference between performance and performance is clearly evident in the field of technical systems. Modern computing machines, including computers, provide increasingly high performance, but the performance of control systems for complex technological equipment built on their basis is completely insufficient for real-time control. As a result, computer control systems are possible only for the least complex technical systems. For these reasons, when managing them in real time, a realizability problem arises, which consists in the need to ensure sufficient speed of the control system, in which the entire necessary set of control operations fits into a control cycle, the duration of which is determined by the requirements of the functional purpose of the technical system.
As will be shown later in the article, the problem of control feasibility is due to the existing relationship between the complexity of an object held in a stable state (including in a state corresponding to the fulfillment of its functional purpose by the object) due to external (control) influence, and the rate of growth of its entropy (chaoticization) in the intervals between control actions.
Communication of control parameters in a complex system
As objects for the system analysis of the problem of the feasibility of controlling complex systems, it seems advisable to choose multi-coordinate machines with numerical control, industrial robots and other mechatronic systems, which can be attributed to complex technical systems that require real-time control.
In relation to the assessment of control objects in the form of various technological equipment, the most practical is to determine complexity within the framework of a set-theoretic concept [5], in which an infinite set of states of a controlled object is reduced to a countable set of discrete states of controlled parameters.
According to the methodology implementing this approach developed by the authors and co-authors [3], the complexity of the control object depends on the number of n types of elements and the average number of m elements of the same type in the system, the number of q types of connections and the average number of g connections of the same type in the system, the average number of p controlled parameters by which the state of an individual element is described the system, as well as the average number s of monitored states of the controlled parameter:
? = n · m1/2 · q · g1/2 · p · s1/2.
During the research, the values of the complexity of the control object, the duration of the control cycle and the required speed of the control system for various technological equipment were determined: a two-axis CNC lathe, a laser machine for cutting metal, a three-axis CNC milling machine, a 6-coordinate manipulator robot, a five-axis machining center, a collaborative robot, an assembly robot SCARA, an electroerosive coordinate-stitching machine with CNC.
As a result, a dependence was obtained, shown in Fig. 1 [6], where each type of technological equipment is represented by two square markers (for speed) and two triangular markers (for the duration of the control cycle) corresponding to the maximum calculated values of speed and duration of the control cycle for this type of equipment.
The following connections have emerged between the control parameters:
Firstly, as the complexity of the control object increases, the permissible duration of the control cycle decreases. This means that the more complex the control object, the more often it is necessary to exert a controlling influence on it. The duration of the control cycle is approximately inversely proportional to the complexity of the control object.
Secondly, as the complexity of the control object increases, the requirements for the speed of the control system increase. The indicated increase in performance is approximately proportional to the square of the complexity of the object.
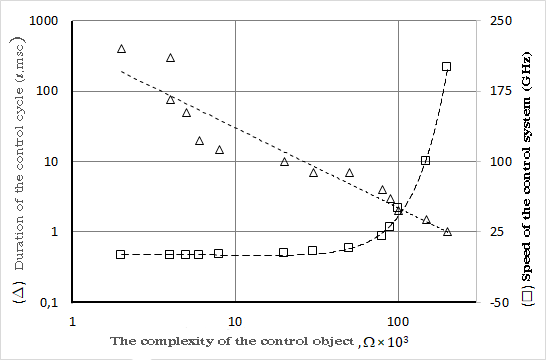
Figure 1. The complexity of the control object, the duration of the control cycle and the required speed of the control system
To determine the mechanisms of formation of the identified relationships of control parameters, we use a theoretical information approach to assessing the complexity of the control object, i.e. we describe changes in the state of the object in the control process in the language of entropy. According to this description, (information) entropy [7; 8] is defined as the logarithm of the number of available states of the system.
To quantify changes in the state of a control object, three assumptions must be made.
1st assumption. The complexity of an object ? is an exact measure of the number of available states (and the logarithm of the number of available states is entropy):
? = exp(k0 + k1 · H) ? H = (ln ? ? k0) / k1,
where H is the current entropy value of the control object; k 0, k 1 are constant coefficients.
A small change in the entropy ? H, corresponding to a small change in the complexity of the object, is determined as follows:
?H = (ln (? + ) ? k0) / k1 ? (ln ? ? k0) / k1 ? 1 / k1 · / ?.
The 2nd assumption. Within small time intervals (between control actions), the spontaneous growth of entropy occurs linearly or, what is the same thing, the number of available states increases exponentially. Based on this assumption, we establish the direct proportionality of the change in entropy ? H to the duration of the control cycle t:
H = k2 · ?, (1)
where k 2 is a constant coefficient.
The 3rd assumption. The control error is directly proportional to changes (fluctuations) in the number of available states of the control object. Based on the 3rd assumption, provided that the magnitude of the control error should remain constant, we have:
? ? = k1 · ? · ?H = const, (2)
where ? is the control error.
Combining expressions (1) and (2) we get:
? · ? = const. (3)
Since the speed of the control system is defined as the ratio of the complexity of the control object to the duration of the control cycle (? = ? / ?), it is possible to write:
?2 / ? = const. (4)
Formulas (3) and (4) correspond to the relationships of control parameters identified in Fig. 1.
Since the logical explanation we have obtained for the complexity of the control object and the speed of the control system observed in complex technical communication systems does not involve taking into account the specifics of technical systems, it can be expanded beyond the scope of technical systems. This means that dependency (4) is common to all control systems.
The steady increase in the speed of the control system as the complexity of the control object increases is a fact that should be taken for granted. The subject of further discussion is not the existence of this trend, but the identification of opportunities to improve the performance of motion control systems.
Realizability of management and general theory of systems
It should be noted that, speaking about ensuring sufficient speed of the control system to counteract the growth of its entropy, we describe the problem of ensuring the stability of the object. In other words, the process of ensuring the stability of the control object is a counteraction to the growth of its entropy in the intervals between control actions.
The conducted research has shown [9] that within the framework of the general theory of systems, there are two main options for increasing the stability of a complex system: a variant of monocentrism with a central element, the interaction of which with other elements has an egressive character [10, book 2, p. 118]), or by increasing the number of connections in the object.
Egression, according to A. Bogdanov, is a special "centralistic" connection, "which decomposes into simpler, ingressive connections; but these connections are all irreversible and converging to one central complex, the tectological function of which, thus, differs significantly from the tectological function of the rest" [10, book 2, p. 101]. Ingression, in turn, is a type of "chain connection" between heterogeneous elements in the structure of the complex, which is carried out with the help of "intermediary" elements to stabilize the complex [10, book 1, p. 155; 11].
An increase in the number of connections in the system, under certain conditions, can ensure an increase in its stability. The effect of increasing the stability of a multiconnected system correlates with the principles of functioning of complex systems [12, pp. 60-67]: the principle of connected diversity, according to which stability increases with increasing number of connections and their diversity; the principle of preferred form, according to which an increase in the diversity and connectivity of the system increases the likelihood of its stable configuration.
The mechanisms for increasing sustainability can be different. In particular, when controlling complex dynamic systems with a huge number of complexly organized internal connections, the reaction of such a system to external exciting factors can be weakened and inhibited: due to the high speed of the subsystems, their mutual influence is minimal and distributed over time. In small intervals, such multiconnected systems can demonstrate load invariance [13]. Another mechanism that makes it possible to increase stability in multiconnected systems is the formation of multiple feedbacks between elements (both positive and negative), the resulting effect of which can contribute to achieving balance in the system and increasing its stability.
The first option of ensuring stability (associated with monocentrism) does not allow to increase performance: all commands and operations are generated by the central element and the final performance is limited by the speed of the central element.
An example of the practical implementation of the first option for ensuring stability in technical systems is the use of a computer-integrated system for motion control, where the central processor performs the function of the central element. Even if you supplement a computer motion control system with high-performance matrix or tensor coprocessors that allow you to perform a huge amount of calculations with high performance, the system's performance remains insufficient for real-time control.
Among animals, forms of organization with rigidly centralized management are not found. This is due to two main reasons:
Firstly, this would inevitably lead to a catastrophic decrease in the speed of control: any unforeseen external factors associated with a falling tree, a collapse of the soil, a predator attack or a retaliatory attack of the hunting object, etc., would pose a real threat to the life and health of the animal.
Secondly, the nature of the organization of living organisms is incompatible with such centralization of the management system. The basis of their stability is the realization of autonomy at each of the levels of organization, both evolutionary (i.e. at each stage of the evolution of the species), structural (within the cell, organ) and functional (within the framework of a separate exchange process that implements the function of the organism). A living organism is not formed all at once and ready (as is possible for technical systems), but is formed and changes in the process of evolution. Therefore, there are never conditions in which such a tightly centralized management system could be formed.
The second option for ensuring stability (associated with an increase in the number of links) it can be implemented in practice in the form of a decentralized system in which the bulk of the operations performed by the elements of the control system are generated autonomously, without the participation (or with minimal participation in the form of dispatching commands) of the central element. As a result, real parallelism of operations is ensured.
For living systems (biological, social, economic), decentralization is the main form of organization, since it best ensures the speed of management. This is especially important for relatively small (for data exchange with a single center) the speeds of transmission and processing of information in the nervous system of animals, in the system of public administration, in dealing in the market of goods, services or currency, etc. The elements of decentralized systems are approximately equal, each of the elements significantly interacts with the others, the states of the elements are mutually conditioned. This is also in good agreement with the organizational forms and connections in systems that are formed naturally (in the process of evolution and self-organization of living systems).
Special cases of decentralized objects in the theory of automatic control are systems built in accordance with the actor model [14]. In this model, actors are universal parallel execution primitives that implement processing, storage, and asynchronous messaging. The actor model of system construction has great potential for implementing high-speed systems with a large volume of distributed (parallel) computing, including for decentralized and asynchronous artificial intelligence systems [15].
For technical real-time motion control systems, it is promising to use a memory-centric architecture [16], in which data does not move between the processor and memory during calculations, but remains in memory, into which the processor is integrated.
Conclusion
Based on the conducted research, the following main conclusions can be drawn:
1. There is a problem of the feasibility of managing complex systems, which consists in the need to ensure sufficient speed of the control system, in which the entire necessary set of control operations fits into a control cycle, the duration of which is determined by the requirements for the functioning of this system.
2. As the complexity of the control object increases, the permissible duration of the control cycle decreases and the requirements for the speed of the control system increase. The indicated increase in performance is approximately proportional to the square of the complexity of the object.
3. The problem of control feasibility is caused by the existence of a connection between the complexity of an object held in a stable state due to external influence and the rate of growth of its entropy in the intervals between control actions.
4. The management of an object within the framework of a theoretical and informational representation of its complexity can be interpreted as a process of preserving its stability by countering the spontaneous growth of entropy.
5. According to the general theory of systems, there are two main options for increasing the stability of a complex system: due to the monocentrism of the architecture with a central element, the interaction of which with other elements has an egressive character, or by increasing the number of connections in the object.
6. The performance requirement is satisfied only when using the stability option based on increasing the number of connections in the system. In practice, this option is implemented in the form of a decentralized system in which the bulk of the operations performed by the elements of the system are generated autonomously, without the participation (or with minimal participation) of the central element.
References
1. Wiener, N. (1958). Cybernetics and Society. Moscow: "Publishing House of Foreign Literature".
2. Shannon, K. (1963). Works on Information Theory and Cybernetics, 243-332. Moscow: Publishing House of Foreign Literature.
3. Zelenskiy, A.A., Kuznetsov, A.P., Ilyukhin, Yu.V., & Gribkov, A.A. (2022). Realizability of motion control of industrial robots, CNC machines and mechatronic systems. Part 1. Machine Building Vestnik, 11, 43-51.
4. Uemov, A.I. (1978). System Approach and General Theory of Systems. Moscow: Mysl.
5. Ashby, W.R. (1969). Theoretical-multiple approach to mechanism and homeostasis. In "Studies on the general theory of systems. Collection of translations", 398-441. Moscow: Progress.
6. Zelensky, A.A., Kuznetsov, A.P., Ilyukhin, Yu.V.V., & Gribkov, A.A. (2023). Realizability of motion control of industrial robots, CNC machines and mechatronic systems. Part 2. Machine Building Vestnik, 3, 213-220.
7. Averin G.V. Zvyagintseva A.V. (2016). On the relationship between statistical and information entropy in describing the states of complex systems. Scientific Vedomosti BelSU, Series "Mathematics. Physics". Issue 44, 20(241), 105-116.
8. Dulesov, A.S., Semenova, M.Yu., & Khrustalev, V.I. (2011). Entropy properties of a technical system. Fundamental Research, 8(part 3), 631-636.
9. Gribkov A.A. (2023). Definition of the secondary laws and properties of objects in the general theory of systems. Part 1. Methodological Approach based on Object Classification. Context and Reflexion: Philosophy about the World and Man, 12(5-6A), 17-30.
10. Bogdanov, A.A. (1989). Tectology. General organizational science. Moscow: Economy.
11. Nikonova, A.A. (2019). On the principle of ingression in the system world of A.A. Bogdanov, or there is no prophet in his fatherland. Chronoeconomics, 7(20), 32-40.
12. Hitchins, D. (1993). Putting Systems to Work. New York: Wiley.
13. Ilyasov, B.G., & Saitova, G.A. (2021). Research of Multilink Systems of Automatic Control of Complex Dynamic Objects on the Basis of B.N. Petrov Paradigm. Problems of Control. Issue 3, 3-15.
14. Rinaldi, L., Torquati, M., Mencagli, G., Danelutto, M., & Menga, T. (2019). Accelerating Actor-based Applications with Parallel Patterns. Proceedings of the 27th Euromicro International Conference on Parallel, Distributed and Network-Based Processing. Pavia, Italy, 13-15 Feb. 2019.
15. Morozov, S.M M., & Kupriyanov, M.S. (2022). Actor model of neuro-fuzzy systems construction. Izvestia SPbGETU "LETI", 15(5/6), 22-31.
16. Kalyaev, I., & Zaborovsky, V. (2019). Artificial Intelligence: from metaphor to technical solutions. Control Engineering Russia, 5(83), 26-3.
Peer Review
Peer reviewers' evaluations remain confidential and are not disclosed to the public. Only external reviews, authorized for publication by the article's author(s), are made public. Typically, these final reviews are conducted after the manuscript's revision. Adhering to our double-blind review policy, the reviewer's identity is kept confidential.
The list of publisher reviewers can be found here.
The authors of the reviewed article point out the complexity of the problem of "formalization" of the concept of "management", and by "complexity" they mean the lack of a definition of this concept today that would cover all special cases of management in individual systems. Note, for our part, that the difficulty (or even impossibility) of giving such a definition is primarily due to the fact that we are talking about a general concept used in languages describing systems of different nature, and none of the researchers working in different fields of science gave their colleagues representing other scientific of course, there are reasons to assume that the conceptual content of the same term is always equivalent in all descriptions using this term. However, the authors, starting from "realistic" ideas about the nature of concepts, still try to give such a universal definition, as they believe. It is unlikely that the format of the review involves a detailed discussion of its strengths and weaknesses, we only note that its significance can be verified only in the process of correcting the content of those scientific disciplines in which the concept of management really "works". Next, I think the title of the article should be adjusted, it would be possible to propose the option "Ontological aspects of the problem ..."; the authors will accept this option or offer some other one, but the problem itself should not be designated as "ontological". The fact is that ontology is a field, a branch of philosophy, that is, a characteristic of a higher degree of generality than some separate topic from this field. The wording presented in the title of the article is similar, for example, to such a formulation as the "Philosophical problem of free will", which, of course, is "philosophical", but there is no need to point to this characteristic located at another level of generalization, since it is already contained in the very concept of this problem. However, it seems that the authors themselves do not fully understand the meaning of the word "ontology", since in their explanations (which are repeated several times) "ontology" is associated with "the existence in being of a connection between the complexity of an object ... and the rate of growth of its entropy." Of course, "existence in being" is an unacceptable expression in itself, but the ratio of the complexity of systems and the growth of entropy in them has nothing to do with ontology at all, ontology deals with the ratio of general concepts (concepts) and reality outside thought (language), which was just mentioned above. Therefore, the content of the article will not suffer if the authors abandon this concept altogether, in any case, they will not put it in the title. We also note that the text needs significant editing, for example, to eliminate many punctuation errors ("difficulties in understanding are due to the existence of self-government along with external management" - why the comma?; on the contrary, in "at first glance productivity ...", "according to A.I. Uemov there are ...", "according to the general theory of systems exists...", etc. commas are needed). Despite the comments made, it should be recognized that the article has original content, it may be of interest to readers, therefore, after correcting spelling errors and stylistic errors ("existence in being", etc.), it can be published in a scientific journal.
Link to this article
You can simply select and copy link from below text field.
|







